My Structure
My Sensors
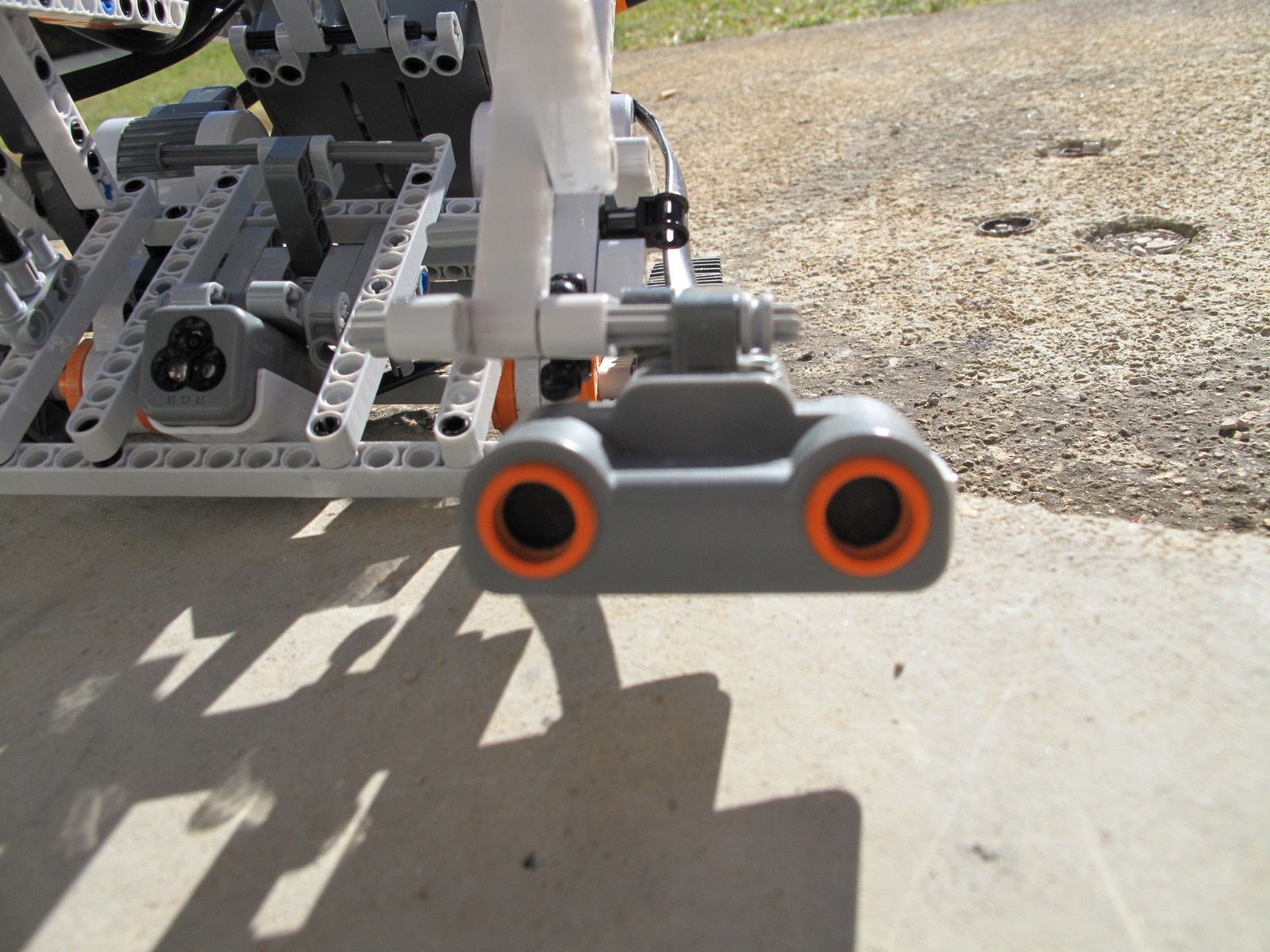
- Ultrasonic Sensor : They are my eyes, using ultrasonics to detect the distance between me and an obstacle ( a wall, a ball or another robot ... ).
They are implemented to detect the ball or set a timeout when I am stucked against an obstacle.
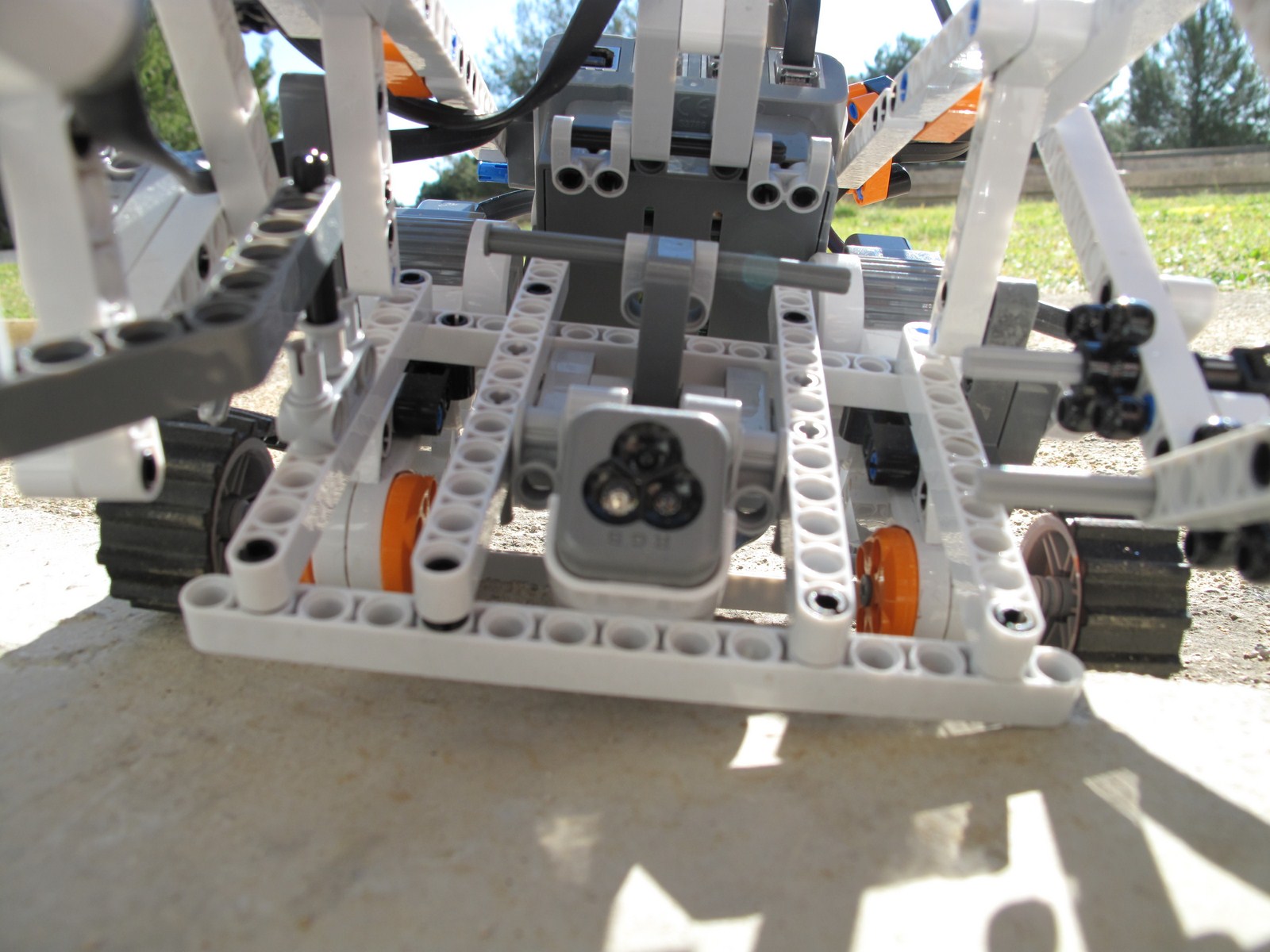
- RGB Color Sensor : It is able to detect a color of an obstacle in front of it. Accurate a less than 5cm
It is implemented to detect if the ball is grabbed and if it is RED or BLUE ball in order to go to the matching basket.
- Compass : This sensor detect an angle for its orientation
It is used to drive me in the correct directions to do my tasks.
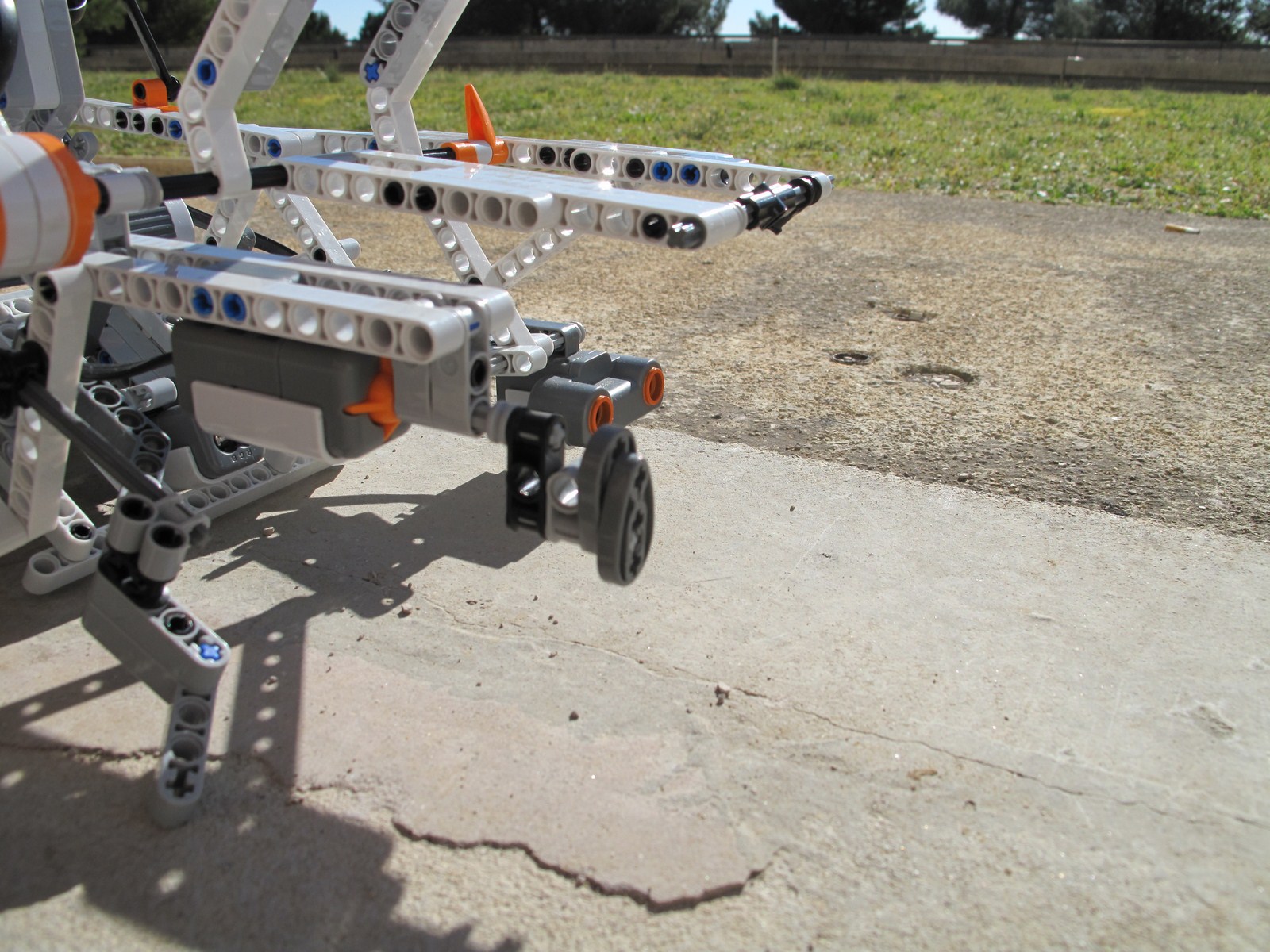
- Touch Sensor : It reacts by sending its value when pressed
It is used to detect when I've reached a wall.